
My previous experiences with a Masters course about 3D kinematics gave me reverence for trying to get things done with 3D camera. Worse, when I bought Kinect I tried to get it to work with Python, but getting the drivers compiled for Windows turned out a bridge to far. So when I saw this book on the O’Reilly Blogger Review Program, I wasn’t sure how accessible it was going to be.
Well I was positively surprised, using Processing makes the projects very interactive and getting things set up was a painless process. After a short introduction, your off to actually using the Kinect. Like tracking the closest object, which let’s you draw (poorly):
Move images Minority Report style and even resizing them based on how far you move your hand from the Kinect. Drawing objects in 3D and turning them into virtual drum kit:
The book has a very gradual increase in complexity, taking you from 2D, to 3D to changing the position of virtual camera and eventually scanning a 3D environment. The book starts to get really cool when you get to the Skeleton tracking part, which allows you to calculate the angles between limbs and use those to control the arm of an Arduino robot.
Controlling a robot arm with Kinect and Arduino from Greg Borenstein on Vimeo.
One of the things I was most impressed with was how easy all these things can be when you use the right tool (awesome Kinect drivers + Processing), compared to the horrors of using just raw 3D coordinates of each joint, Kinect makes 3D kinematics fun!
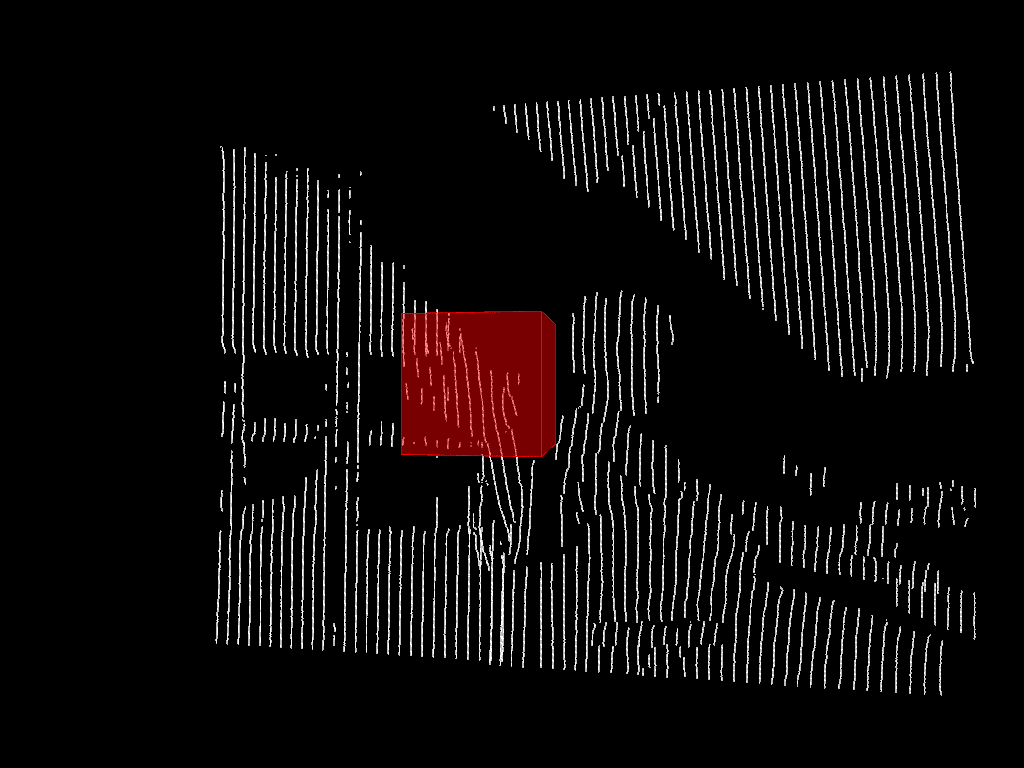
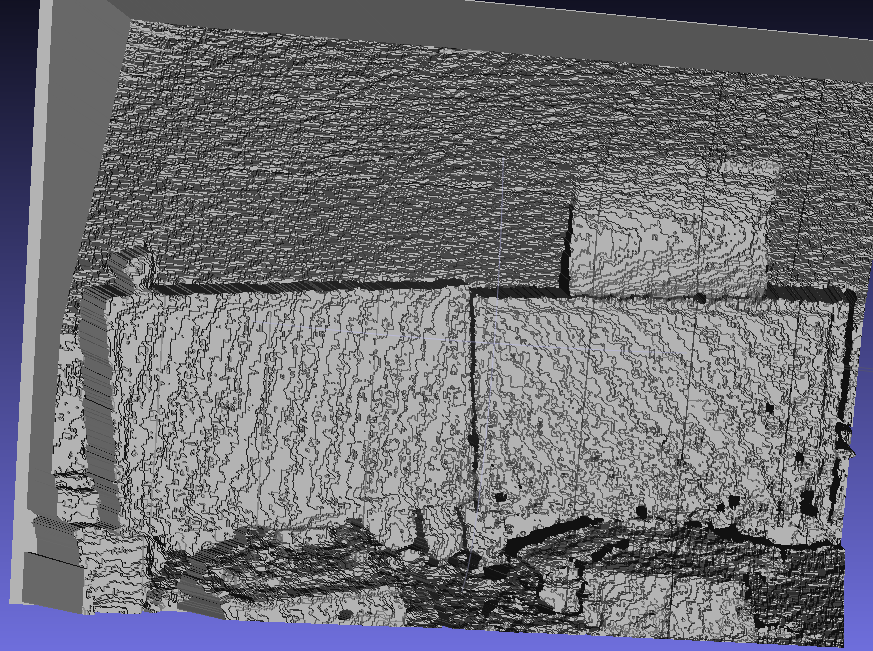
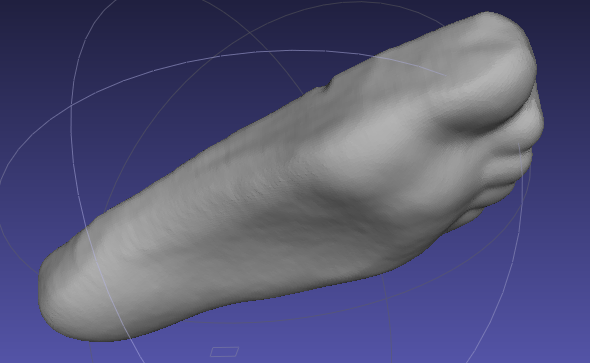
Given my lack of Arduino, I sadly wasn’t able to test it myself, though I’m convinced it can all be done pretty easily. I also don’t own a MakerBot (or any 3D printer), but I do have an interest in the topic. The accuracy of the Kinect is pretty decent (see image on the left), but I fear it’s a bit too low resolution (and rather slow) to scan a foot (like mine on the right from a professional 3D scanner). Let alone have it scan you while walking, but these first results already make me very optimistic about the future of 3D printing and scanning!
Thanks to the book, I’ve found some new skills and it helped boost my confidence that I’ll actually be able to make something useful with Kinect. So I’m going to see whether I can use Kinect to help improve the paw detection of my pressure measurement software, for instance by using the coordinates of the paws to ‘detect’ which paw landed where. Exciting!
So to conclude, I would definitely recommend this book to anyone interesting in experimenting with Kinect. I easily got through the book in 3 days and with the help of Greg’s GitHub you should have no trouble getting the examples to work! A definite recommendation!
![]()